Automatska linija za pakiranje koordinatnih kutija





Automatski koordinatni slučajlinija za pakiranje,
linija za pakiranje,
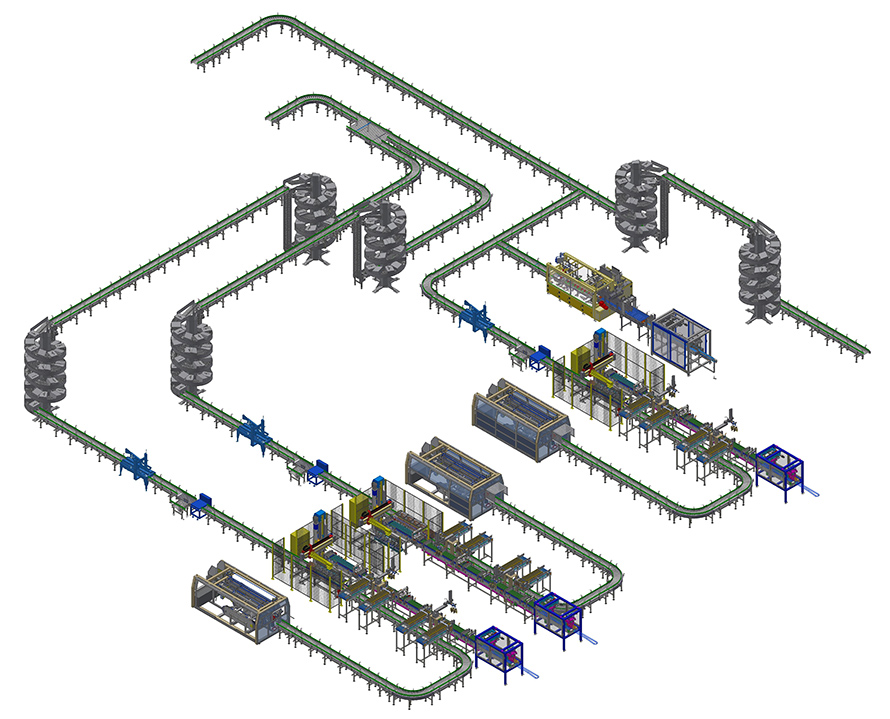
Proizvodna linija za pakiranje sastoji se od brzog razdjelnika, linije za transport proizvoda, hvataljke, Hbota, mehanizma za pomicanje s dvostrukom osovinom, linije za transport kutija, mehanizma za detekciju, hvataljke za kartonsku pregradu, sustava za uvlačenje kartonske pregrade, servo koordinate, hvataljke za boce i zaštitne ograde. Brzi razdjelnik dijeli proizvode u više traka, dok mehanizam za pomicanje s dvostrukom osovinom ubrzava prolaz proizvoda. Nakon što proizvod stigne na stanicu za pregradnju kartona, robot Scar utovaruje kartonsku pregradu u složene proizvode. Proizvodi stižu na transporter za sortiranje. Nakon toga, proizvodi se uzimaju hvataljkom i stavljaju u kartonsku kutiju, a transporter za kutije transportira kutiju koja sadrži proizvod.
Kompletan raspored sustava pakiranja
Glavna konfiguracija
| Robotska ruka | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Servo motor | Siemens/Panasonic |
| VFD | Danfoss |
| Fotoelektrični senzor | BOLEST |
| Zaslon osjetljiv na dodir | Siemens |
| Niskonaponski uređaji | Šnajder |
| Terminal | Feniks |
| Pneumatski | FESTO/SMC |
| Vakuumski disk | PIAB |
| Ležaj | KF/NSK |
| Vakuumska pumpa | PIAB |
| PLC | Siemens /Schneider |
| HMI | Siemens /Schneider |
| Lančana ploča/lanac | Intralox/rexnord/Regina |
Opis glavne strukture




Više video emisija
- Servo koordinatni pakirni stroj za staklene boce s kartonskom pregradom
Kako se upravlja pakirnim strojem? Proizvodi prolaze kroz niz automatiziranih
i uredne korake, uključujući sortiranje kroz transportnu proizvodnu liniju, prelazak na sortiranje, ubrzani međuspremnik, stroj za pakiranje, automatski mehanizam za brtvljenje i konačno izlaz putem transportne linije.










